




Les moteurs à courant continu sont largement utilisés dans les applications industrielles et domestiques pour des projets personnels. L'un des principaux facteurs à prendre en compte lors du choix d'un moteur à courant continu est la possibilité d'y ajouter une forme de rétroaction.
Qu'est-ce que le feedback ?
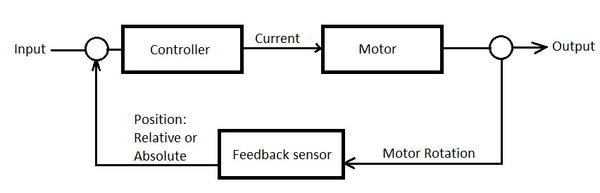
La rétroaction désigne toute information qu'un contrôleur peut utiliser pour surveiller un processus. Dans les moteurs à courant continu, la rétroaction est généralement collectée sous forme de position, de nombre de tours et de sens de rotation. Ces informations peuvent ensuite être transmises au contrôleur pour mesurer la vitesse angulaire et la position de l'arbre moteur. C'est ce qu'on appelle communément une forme de « contrôle en boucle fermée ».
Dans des cas d'utilisation plus sophistiqués, le retour d'information du moteur et d'autres sources peut être contrôlé pour obtenir non seulement une vitesse et une position précises, mais également la réponse dynamique, la synchronisation et la stabilité souhaitées.
Avantages de l'utilisation du feedback
Correctement mis en œuvre, le retour d'information peut permettre aux machines de fonctionner plus efficacement et avec une meilleure répétabilité. Il permet à votre mécanisme d'ajuster automatiquement la sortie pour maintenir la stabilité, réduire les variations et minimiser les erreurs, sans intervention humaine.
Le thermostat est un exemple simple de bon système de contrôle à rétroaction. Il mesure la température de la pièce et ajuste la puissance des éléments chauffants pour maintenir une température définie.
L'un des principaux avantages de la rétroaction pour les moteurs à courant continu est le contrôle PID. Le PID désigne un mécanisme de boucle de régulation largement utilisé dans l'industrie pour compenser automatiquement les erreurs de vitesse ou de position de la machine.
Le feedback peut également servir à mettre en œuvre des mécanismes de sécurité et à dépanner votre application. Par exemple, si votre actionneurs linéaires Sont censés se déplacer de manière synchronisée, mais l'un d'eux est en retard, ce qui indique un problème. Le système peut alors arrêter le mouvement des deux actionneurs pour éviter tout dommage ou basculement.
Types de capteurs de rétroaction pour moteurs à courant continu
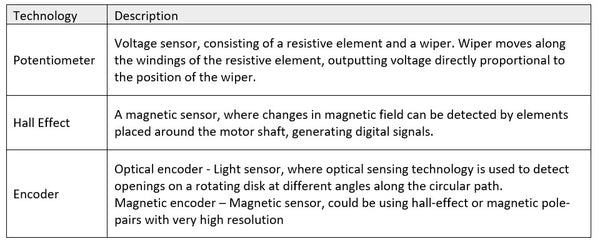
Les types de rétroaction les plus courants pour les moteurs à courant continu sont les potentiomètres, les capteurs à effet Hall et les codeurs. En termes de précision et d'exactitude, ces trois types sont comparables et très performants avec les technologies modernes. Les différences résident dans les exigences de performance spécifiques telles que la durabilité, les facteurs environnementaux, les interférences électromagnétiques et les performances thermiques.
Potentiomètre
Le principal avantage de ce type de rétroaction est sa simplicité. Le potentiomètre transforme efficacement un signal régulier moteur à courant continu Intégrés dans un servomoteur, ils permettent un contrôle précis du mouvement et/ou de la vitesse. Les potentiomètres fournissent des informations directes sur la position angulaire de l'arbre moteur. Ainsi, en cas de perte de puissance, le potentiomètre conserve ses informations de position sans avoir besoin de revenir à la position initiale. De plus, comme les potentiomètres ne sont que des diviseurs de tension dotés d'une grande résistance, ils sont efficaces pour gérer les interférences électromagnétiques (IEM).
L'utilisation de potentiomètres présente également des inconvénients. Les capteurs à potentiomètre nécessitent un contact pour effectuer les mesures, ce qui signifie qu'ils sont moins durables et ont une durée de vie utile limitée par rapport à d'autres formes de rétroaction. Les potentiomètres sont une forme de mesure relativement lente, à la fois en raison de la nécessité d'un contact et du besoin d'un convertisseur analogique-numérique avant l'établissement d'une véritable commande de rétroaction. Enfin, les potentiomètres des moteurs limitent le nombre de rotations d'un arbre. Les applications avec rétroaction par potentiomètres doivent s'assurer qu'il existe un moyen d'empêcher tout déplacement excessif.
Effet Hall
capteurs à effet Hall Les capteurs à effet Hall sont essentiels à la rétroaction des moteurs, car ils sont fiables, précis et dotés d'une longue durée de vie. Contrairement aux potentiomètres, les capteurs à effet Hall n'ont pas besoin de contact, ce qui les rend utiles dans les environnements difficiles, très résistants à l'usure et fiables en conditions de chocs importants. Les capteurs à effet Hall génèrent des impulsions électriques lorsque l'aimant est aligné avec l'électronique de détection. De ce fait, ils conviennent aux applications à grande vitesse et permettent de préprogrammer certains angles d'arbre moteur.
L'un des inconvénients des capteurs à effet Hall est qu'ils ne peuvent fournir que des informations de position relative. Cela signifie qu'à chaque coupure de courant, les capteurs à effet Hall doivent être déplacés vers un emplacement connu et réinitialisés. De plus, les fils des capteurs à effet Hall transportant les informations peuvent être vulnérables aux interférences électromagnétiques et au bruit. De ce fait, les signaux peuvent parfois être perdus ou de faux signaux peuvent être générés, ce qui peut entraîner une dérive des informations de position au fil du temps.
Encodeur
Il existe des codeurs optiques et magnétiques. Les codeurs magnétiques sont probablement le meilleur capteur global pour générer Signaux de rétroaction . Ils sont sans contact, comme les capteurs à effet Hall, ce qui leur confère une durée de vie très longue. Ils sont très rapides et offrent généralement une très haute résolution. De plus, les codeurs magnétiques ne sont pas affectés par la poussière ou d'autres particules et peuvent être utilisés dans divers environnements.
Les encodeurs sont généralement coûteux et nécessitent une électronique dédiée, parfois difficile à configurer et à contrôler. Ajouter une complexité inutile à la conception n'est pas toujours judicieux, car cela augmenterait également le nombre de modes de défaillance potentiels.
Les concepteurs disposent de diverses formes de retour d'information et, grâce aux progrès technologiques modernes, leur précision peut être quasiment équivalente. Lors du choix du type de retour d'information, il est essentiel de prendre en compte les besoins de performance de l'application et de comprendre les avantages des technologies utilisées.