




Le Actionneur linéaire électrique PA-12 est un excellent exemple des principes de conception allégée et représente l'avenir du mouvement linéaire. Si vous recherchez un dispositif offrant les meilleures performances de sa catégorie dans un format compact, ne cherchez plus. Le PA-12 offre de nombreuses solutions modernes aux problèmes récurrents, et cet article présente les principales caractéristiques de sa conception. Cet actionneur linéaire est spécialement conçu pour fournir le mouvement le plus précis possible avec une haute résolution, sans nécessiter de paramètres de contrôle ni de compensation de position pour différentes conditions de charge. Pour ce faire, il est équipé d'un potentiomètre de très haute précision avec filtre intégré pour réduire le bruit électrique, et d'un moteur très léger pour atténuer l'impact de l'inertie. Nous proposons également des actionneurs PA-12 avec moteurs sans noyau, qui offrent des performances nettement supérieures à celles des moteurs avec noyau et contribuent à une précision accrue.
Cet actionneur électrique est équipé d'un ordinateur de bord qui gère tous les calculs nécessaires. Il suffit à l'utilisateur de saisir les commandes, soit en mode TTL ou RS-485 Format. Alternativement, le PA-12 peut être connecté au contrôleur informatique LC-12, et vous pourrez ainsi envoyer des commandes via une interface sur votre PC. Ceci étant dit, découvrons le PA-12 et tout ce qu'il a à offrir !
Précision du mouvement
Nous avons fait réaliser un test indépendant sur nos actionneurs PA-12 afin de calculer leur précision de mouvement. Ce test consistait à exécuter avec précision deux comptages de servomoteurs par commande de mouvement, soit 0,001074 pouce par mouvement. Les mesures ont été recueillies à l'aide d'un indicateur de position laser de précision, et l'actionneur était également équipé d'une charge de 15 lb pour l'extension et la rétraction. Les résultats sont présentés dans les graphiques ci-dessous.
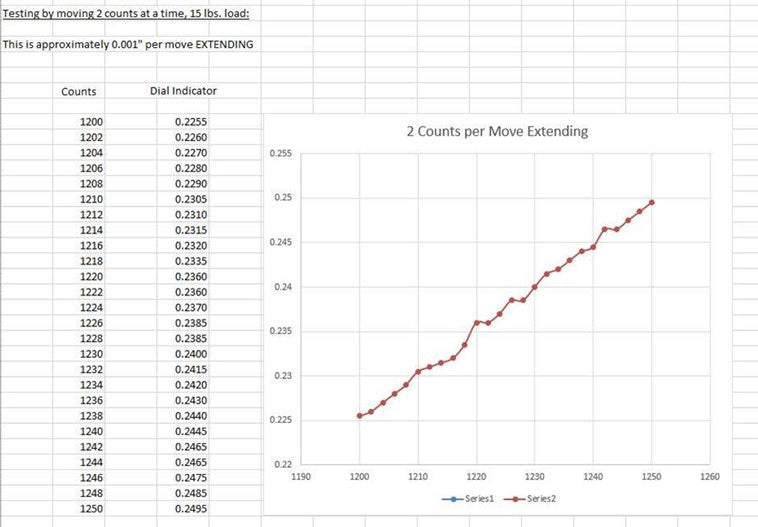

La plupart des instruments courants ne peuvent pas percevoir avec précision un changement de position aussi faible. Si l'actionneur avait été déplacé par incréments plus importants, les résultats auraient été encore plus précis. Ce mouvement repose sur deux facteurs : la haute précision du potentiomètre intégré et un régulateur PID correctement calibré. Les paramètres de régulation PID peuvent être modifiés via les commandes numériques, mais cela n'est pas recommandé.
Moteur avec noyau ou sans noyau
Le PA-12 peut être équipé d'un moteur CC avec ou sans noyau. Nous vous présenterons les avantages et les inconvénients de chaque type de moteur.
Moteur à noyau
Dans un moteur à courant continu classique, une bobine est enroulée autour du noyau de fer du rotor. Lorsqu'un courant est appliqué à la bobine, celle-ci crée un champ magnétique qui, associé au stator, entraîne la rotation du moteur. Le moteur à courant continu à balais et noyau de fer est une option éprouvée, fiable et économique. Un moteur à courant continu à balais et noyau de fer peut fonctionner en tension continue continue et supporter un couple élevé grâce au noyau de fer qui assure la rigidité de l'ensemble. Le noyau permet également au moteur d'atteindre des consommations de courant plus élevées en agissant comme un dissipateur thermique et en permettant à la chaleur de se dissiper. Ce type de moteur est très simple et pourtant efficace, mais il présente quelques inconvénients.
Un moteur à courant continu à balais avec noyau a tendance à avoir des accélérations et des décélérations plus faibles en raison du poids supplémentaire du noyau en fer. Ce moteur a également tendance à avoir une inductance plus élevée, ce qui entraîne davantage d'arcs électriques accidentels entre le collecteur et les balais. Cet effet accélère l'usure des balais au fil du temps.
Moteur sans noyau
Un moteur à courant continu à balais sans noyau est la solution à bon nombre de ces problèmes. Un moteur sans noyau est construit à partir d'un maillage d'enroulement autoporteur qui ne nécessite pas de noyau pour maintenir sa forme. Cela rend le rotor très léger, ce qui lui permet d'accélérer et de s'arrêter beaucoup plus rapidement. Il est plus efficace, nécessitant moins de courant pour atteindre le même couple qu'un moteur à noyau de fer. Ces types de bobinages sophistiqués présentent également une inductance plus faible, ce qui signifie que l'arc électrique entre le collecteur et les balais se produit à une puissance et une fréquence plus faibles.
Les inconvénients des moteurs sans noyau sont leur taille limitée, leur coût élevé et la nécessité d'un dissipateur thermique. Dans un moteur à noyau, le noyau évacue la chaleur des bobines, mais des méthodes alternatives de gestion thermique sont nécessaires pour garantir un fonctionnement stable et durable du moteur à courant continu sans noyau.
Le moteur à noyau PA-12 est déjà très léger, compact et à charge inertielle réduite. Pour des besoins de micropositionnement spécifiques, il est conseillé d'opter pour un moteur sans noyau, car il permettra à votre application d'obtenir les meilleurs résultats.
Filtrage et bruit
La particularité du PA-12 réside dans sa capacité à effectuer des mesures de position précises et constantes à l'aide du potentiomètre. Pour ce faire, le PA-12 est équipé d'un convertisseur analogique-numérique (CAN) interfaçant avec le potentiomètre. Le contrôleur embarqué filtre les signaux provenant du potentiomètre et convertit les données analogiques en réponses numériques pouvant être transmises via des protocoles de communication TTL ou RS-485. Pour des mesures optimales en conditions normales, la fréquence de lecture recommandée est de 100 fois par seconde. Cela signifie que les informations de position peuvent être mises à jour à une fréquence de 100 Hz.
Cela étant dit, les actionneurs PA-12 sont capables de lire les données à une fréquence maximale de 500 fois par seconde. Pour obtenir ce résultat, les unités doivent être configurées sur mesure en usine, mais il est possible d'obtenir une fréquence de rafraîchissement élevée sans compromettre la précision.
Communication
Le point le plus important à retenir concernant ces actionneurs est qu'ils ne peuvent pas être contrôlés par des moyens classiques. Pour obtenir les performances, la stabilité et la précision de positionnement des actionneurs PA-12, l'utilisateur doit s'interfacer avec le microcontrôleur interne via le protocole RS-485 ou TTL. Les unités compatibles TTL peuvent communiquer via des impulsions d'asservissement.
TTL et RS-485 sont des normes de communication série. Elles fournissent un cadre pour développer un ensemble de commandes et de réponses au format 8 bits, utilisables pour l'interface avec le microcontrôleur embarqué du PA-12.
Les paramètres de communication pour la connexion de données série pour TTL et RS-485 sont indiqués ci-dessous :

Structure
La structure de données pour la communication avec le microcontrôleur embarqué PA-12 est un UART semi-duplex. Un système de communication full-duplex permet aux deux appareils de transmettre et de recevoir des données simultanément. Dans le cas du PA-12, le système est semi-duplex. Cela signifie que les appareils peuvent communiquer entre eux, mais pas simultanément. À tout moment de la communication, un appareil doit transmettre tandis que l'autre reçoit, et inversement.
Pour cette raison, si vous essayez de communiquer avec un PA-12 via un périphérique de communication série duplex intégral, vous devrez utiliser un tampon entre les deux.

Figure 1 : Schéma de câblage de communication TTL/PWM pour semi-duplex
Pour la communication TTL/PWM entre un périphérique full duplex et le PA-12, nous recommandons d'utiliser une puce 74LVC2G241 comme tampon. Un périphérique full duplex peut être un microcontrôleur Arduino. Pour plus d'informations sur sa configuration, consultez notre article « Démarrer avec Arduino et le PA-12 » .

Figure 2 : Schéma de câblage de communication RS-485 pour semi-duplex
Pour les actionneurs de type RS-485, nous recommandons d'utiliser la puce MAX485 comme tampon entre un contrôleur full duplex et le dispositif PA-12 half-duplex. Bien entendu, les dispositifs de communication half-duplex n'auront aucun problème à communiquer directement avec le PA-12. Par exemple, un module PLC Allen-Bradley 1769-ASCII peut communiquer directement avec le PA-12.
Débit en bauds
Le débit en bauds représente la vitesse de communication entre les appareils sur le canal de données. Le débit en bauds par défaut des actionneurs PA-12 est de 57 600 bps. Si votre appareil de communication utilise un débit différent, deux méthodes s'offrent à vous pour le modifier. La plus simple consiste à connecter le PA-12 à un PC via notre contrôleur d'interface LC-12 et à effectuer les modifications via l'application. Vous pouvez également définir le débit en bauds via la commande d'écriture RS-485. Pour ce faire, procédez comme suit :
1. Réglez le débit en bauds du module de communication sur 57600.
2. Écrivez le débit en bauds souhaité dans l'adresse mémoire 0x04.

3. La valeur du débit en bauds dans l'adresse 0x04 doit être définie sur l'une des 4 valeurs spécifiques, 32 correspondant à 57600 étant la valeur par défaut.

4. Le PA-12 doit être redémarré pour que ces modifications soient prises en compte. Vous devrez éteindre le PA-12, puis modifier le débit en bauds de votre appareil de communication et rallumer le système.
Contrôleur d'interface PC LC-12
Le moyen le plus simple de communiquer avec l'ordinateur interne du PA-12 est d'utiliser le contrôleur d'interface PC LC-12 . Il permet de connecter des actionneurs TTL/PWM et RS-485. Le LC-12 est également nécessaire pour télécharger et installer les mises à jour du firmware.
Le contrôleur d'interface permet de configurer facilement les paramètres de fonctionnement des actionneurs PA-12. Par exemple, pour certaines applications, vous pouvez définir les limites d'extension et de rétraction, le débit en bauds, la température maximale, le courant maximal, l'erreur de position maximale autorisée, etc. Pour les grandes séries, Progressive Automations préprogramme toutes les unités, mais pour des quantités de production inférieures ou égales à 50 unités, il peut être plus simple de configurer les paramètres via l'interface.

Le LC-12 permet de tester le mouvement de l'actionneur sans avoir à configurer les communications TTL et RS-485. En l'absence de problème matériel, le LC-12 pourra toujours se connecter à l'actionneur PA-12. Cela peut s'avérer utile pour surveiller les paramètres définis dans la carte mémoire afin de vérifier l'exactitude des données et de corriger les erreurs si nécessaire.
L'ordinateur interne du PA-12 est capable d'autodiagnostiquer les problèmes et d'afficher les codes d'erreur pendant le fonctionnement. Il peut être difficile d'identifier précisément le problème de l'actionneur en recevant simplement les signaux de retour. L'interface PC du LC-12 permet de rechercher et d'afficher les erreurs générées par l'actionneur, facilitant ainsi la résolution des problèmes. Par exemple, si l'actionneur n'atteint pas sa position cible, vous pouvez consulter l'affichage des erreurs et le moniteur actuel de l'interface pour déterminer s'il y a un obstacle.

Enfin, le contrôleur d'interface PC LC-12 offre deux fonctions importantes pour les actionneurs PA-12, ce qui en fait un compagnon indispensable pour l'échantillonnage initial et le dépannage. Le LC-12 est le seul moyen de réinitialiser l'actionneur aux paramètres d'usine par défaut et d'appliquer les mises à jour du firmware.
Dernier mot
Dans cet article, nous vous présentons les principales caractéristiques du mouvement de précision, les moteurs avec ou sans noyau et le faible bruit de notre actionneur linéaire électrique PA-12. Il existe différentes manières de communiquer avec cet actionneur, le contrôleur d'interface PC LC-12 étant considéré comme le plus simple par nos ingénieurs.
Nous espérons que vous avez apprécié cet article. Si vous avez d’autres questions sur notre PA-12 ou sur l’un des sujets abordés dans cet article, envoyez-nous un e-mail ou appelez-nous au 1-800-676-6123 (sans frais).